




{kind=link}
Oggi nel campo della sensoristica, i sensori di posizione hanno un ruolo fondamentale. Complici i crescenti livelli di automazione, infatti, il controllo del movimento è destinato ad assumere un ruolo sempre più rilevante.
Per poter pilotare un motore in modo efficace, sono necessari ingressi di controllo in grado di descrivere velocità e posizione. Per effettuare questi rilevamenti, sono disponibili diverse tecniche che differiscono tra loro in termini di caratteristiche e campi di applicazione.
Cos'è un sensore di posizione
Intanto, se vi state chiedendo cos'è esattamente un sensore di posizione, ecco una sintetica definizione.
I sensori di posizione, anche definiti sensori di movimento, sono dispositivi utilizzati per misurare precisamente la posizione fisica e/o la velocità di un asset o componente meccanico al quale sono fissati in un determinato momento nel tempo.
Il rilevamento della posizione: le applicazioni possibili
Passando alle applicazioni, va detto che il numero di applicazioni di rilevamento della posizione è in rapido aumento. Sempre più processi, un tempo manuali, sono automatizzati al fine di ottenere maggiori livelli di accuratezza, una resa migliore e una riduzione dei costi operativi.
Laddove esista qualche forma di movimento, sarà sempre presente un sensore che fornirà informazioni riguardanti la posizione a un controllore.
I sensori di posizione nelle applicazioni industriali
Con la diffusione del paradigma Industria 4.0, si sono registrati notevoli progressi nella sfera dell’automazione per i mercati industriali. La robotica si diffonde in misura sempre maggiore, consentendo l’implementazione di fabbriche completamente automatizzate che operano a ciclo continuo (24/7) e senza errori. Fabbriche dove c'è un intervento minimo del personale umano (si parla in questo caso di fabbriche “lights-out”, ovvero a luci spente).
In tale contesto, è necessaria la presenza di un sensore per ciascun asse di movimento. Un discorso analogo vale per i cobot, che operano a stretto contatto degli operatori umani nelle fabbriche tradizionali.
Al giorno d’oggi, numerosi componenti sono fabbricati da macchine. Queste possono essere apparecchiature a controllo numerico computerizzate (CNC, Computer Numerical Control), sistemi per il taglio laser oppure stampanti 3D. Poiché ciascuna di esse presenta parti in movimento, è necessario un controllo preciso della posizione per soddisfare i requisiti di qualità imposti. Una volta che hanno preso forma, i materiali sono spesso movimentati utilizzando appositi sistemi automatizzati o nastri trasportatori. Anche in questo caso, quindi, è necessario il rilevamento della posizione.
I sensori di posizione nel medicale...
Al di fuori dell’ambiente di fabbrica, il controllo della posizione è richiesto, ad esempio, per apparecchiature medicali di grandi dimensioni adibite al trasporto dei pazienti o dello scanner. Senza dimenticare i robot che vengono impiegati per gli interventi chirurgici che, ovviamente, richiedono un controllo estremamente preciso.
... e nei trasporti
Nel settore dei trasporti il movimento, il sensore di posizione è presente in qualsiasi applicazione. Il rilevamento della posizione è richiesto sia per i veicoli tradizionali (treni, macchine agricole e per l’edilizia), sia per le nuove applicazioni come i robot mobili autonomi (AMR, Autonomous Mobile Robot) sempre più presenti nei magazzini. Senza dimenticare le migliaia di droni utilizzati ogni giorno.
A causa della crescente elettrificazione dei veicoli, qualunque sia il tipo di propulsione adottata (motore a combustione interna o batterie nel caso di veicoli elettrici e ibridi), gli schemi di controllo meccanici vengono via via sostituiti da sistemi quali “drive by wire” e “steer by wire”. Per il funzionamento di sistemi di questo tipo è necessario comunicare la posizione del pedale dell’acceleratore alla centralina elettronica (ECU, Elecronic Control Unit) o quella del volante al sistema di controllo dello sterzo.
Poiché il controllo si estende ora a tutti gli aspetti del funzionamento di un veicolo, il rilevamento della posizione è richiesto anche per i componenti della sospensione, per il livellamento e il controllo della marcia. Ma è richiesto poi anche per il gruppo propulsore (power train) e per altri componenti dell'abitacolo di un veicolo. Si pensi ai finestrini elettrici, al tettuccio apribile e alle serrature delle portiere.
Un confronto fra diverse tecnologie di rilevamento della posizione
Per rilevare la posizione angolare sono tre le tecnologie più utilizzate: ottica, magnetica e induttiva. Ciascuna di esse, ovviamente, presenta vantaggi e svantaggi e differisce in termini di modalità di funzionamento e campi di applicazione.
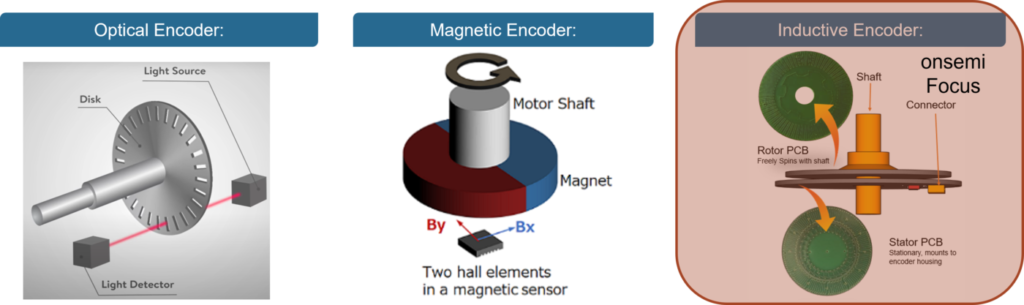
I sensori di posizione ottici
Gli encoder ottici sono spesso considerati i dispositivi in grado di assicurare la migliore accuratezza, anche se ciò non corrisponde al vero per tutti i casi. Il loro principio di funzionamento prevede il passaggio della luce attraverso un disco forato in maniera opportuna. Quando il disco ruota, gli impulsi luminosi consentono di rilevare il movimento.
In genere, questi dispositivi vengono utilizzati in applicazioni che richiedono la massima accuratezza, come la robotica di precisione e le macchine utensili (torni CNC o sistemi di taglio laser). Pur essendo estremamente precisi e non soggetti all'influenza dei campi magnetici, sono sensibili alle vibrazioni e alla sporcizia del disco, che possono comprometterne l'utilizzo.
I sensori di posizione magnetici
Gli encoder magnetici tendono ad avere livelli di accuratezza inferiori e sono utilizzati principalmente in applicazioni dove il costo rappresenta un elemento critico.
Ideali per applicazioni nelle quali sono presenti vibrazioni o agenti contaminanti, sono ovviamente influenzati dai campi magnetici esterni, fatto questo che ne limita i campi di applicazione.
I sensori di posizione induttivi
Gli encoder induttivi, infine, implicano una migliore accuratezza rispetto alle loro controparti magnetiche. In grado di supportare vibrazioni di elevata intensità e alti livelli di contaminazione, sono insensibili ai campi magnetici.
Ripetibilità, insensibilità alle variazioni di temperatura, basso numero di componenti richiesti e dimensioni ridotte sono gli altri vantaggi di questo tipo di encoder. Senza dimenticare che non richiedono l'utilizzo di terre rare sotto forma di magneti.
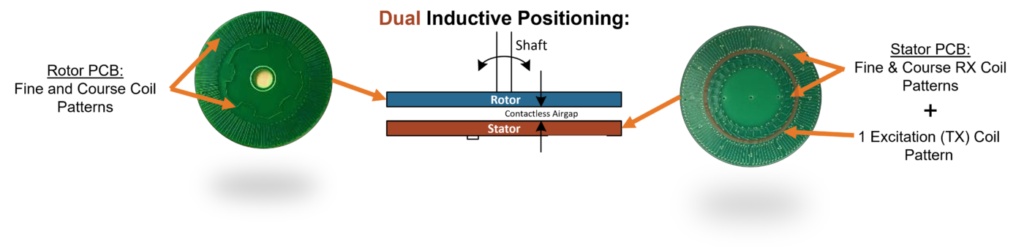
La tecnologia a doppia induzione
Il sensore di posizione basato sulla tecnologia a doppia induzione (dual inductive) NCS32100 di onsemi garantisce un'accuratezza nel rilevamento della posizione (quando accoppiato con un sensore su scheda in modalità contactess) migliore di +/- 50 arcsec (che corrisponde a rotazione meccanica di 0,0138°).
Utilizza due semplici, ma innovativi dischi PCB. Uno è attaccato allo statore del motore (stazionario). L'altro, formato da una scheda PCB a singolo strato, è fissato al rotore o albero. Entrambe le schede PCB sono parallele l'una con l'altra, separate da un traferro (air gap) di spessore compreso tra 0,1 e 2,5 mm. Il sensore NCS32100 è posizionato sulla scheda PCB dello statore.
Le piste conduttive (duali) per il rilevamento accurato (fine) e grossolano (coarse), o bobine, sono stampate su entrambe le superfici dei dischi. Una terza pista conduttiva, denominata bobina di eccitazione, è stampata sulla scheda PCB dello statore.
Il sensore NCS32100 trasmette un'onda sinusoidale di frequenza pari a 4 MHz nella bobina di eccitazione, creando un campo elettromagnetico attorno alla bobina di eccitazione dello statore.
In base alla legge di mutua induzione di Faraday, le bobine per il rilevamento grossolano e accurato si intersecano con il campo elettromagnetico, accoppiando l'energia sulle bobine dello statore, sotto forma di correnti parassite (eddy current).
Nel frattempo, le bobine per il rilevamento accurato e grossolano dello statore si collegano a un massimo di otto ingressi di ricezione del NCS32100. Quando il rotore gira, le correnti parassite del rotore disturbano le bobine di ricezione dello statore. Il sensore NCS32100 misura la posizione del rotore mediante l'elaborazione di questi disturbi condotta con algoritmi proprietari integrati nel processore DSP (Digital Signal Processor) interno.
Accuratezza e velocità
Con un sensore su scheda di diametro di 40 mm, l'NCS32100 garantisce un’accuratezza migliore di +/-50 arcsec fino a una velocità di 6.000 RPM (Resolution Per Minute). Può fornire posizioni a una velocità massima di 45.000 RPM, anche se ciò comporta una leggera riduzione dell’accuratezza. Inoltre, è possibile ottenere livelli di accuratezza ancora più elevati, inferiori a +/- 10 arcsec, utilizzando un sensore su scheda di dimensioni maggiori oppure mediante un allineamento più preciso tra rotore e statore.
Questa soluzione può essere implementata utilizzando un numero ridotto di componenti, garantendo dimensioni e costi contenuti. Essa, inoltre, non è assolutamente influenzata da variazioni di temperatura, eventuali contaminazioni e dalla presenza di campi magnetici esterni.
Le soluzioni integrate per i sensori di posizione a doppia induzione
Il dispositivo NCS32100 di onsemi consente di progettare un sensore di posizione angolare di elevata precisione da utilizzare in svariati ambienti e applicazioni industriali. Essendo un encoder assoluto, può fornire i dati di posizione anche quando il rotore non è in movimento. NCS32100 è anche in grado di calcolare la velocità di rotazione fino a 45.000 RPM.
Grazie a un'accuratezza di ± 50 arcsec a una velocità massima di 6.000 RPM, NCS32100 si pone in diretta concorrenza con numerosi encoder ottici. Il dispositivo integra anche una MCU Arm Cortex M0+, garantendo un elevato livello di configurabilità, e prevede un sensore di temperatura interno.
La routine di calibrazione integrata nel sensore NCS32100 consente l'autocalibrazione dei sensori con un unico comando, un processo che richiede solamente un paio di secondi. Non è necessaria la presenza di alcun encoder di riferimento. La routine può essere fatta girare in qualsiasi momento, a patto che il rotore si stia muovendo con una velocità compresa tra 100 e 1.000 RPM. Tutti i coefficienti di calibrazione vengono archiviati in una memoria non volatile (NVM).
Una soluzione ottica tradizionale richiederebbe un totale di tre schede PCB, un disco ottico, una scheda PCB per lo statore e un'altra per il pilotaggio dei LED. In pratica sarebbero necessari circa un centinaio di componenti per garantire la completa operatività.
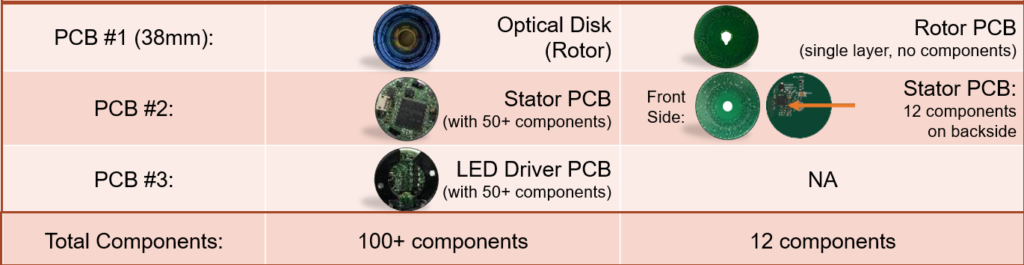
Una soluzione basata sul sensore NCS32100 richiede invece due sole schede PCB: il rotore che è una scheda a singolo strato priva di componenti e la scheda per lo statore che ospita solamente dodici componenti.
Un esempio nell'automotive
Nelle applicazioni automotive, è risaputo, costo e affidabilità sono importanti, ma la sicurezza è fondamentale, soprattutto in applicazioni quali la sterzata e la frenata. Il sensore di posizione assoluta NCV77320 di onsemi è stato concepito per l'uso in ambito automotive e progettato in conformità alle normative ISO26262 espressamente per questi casi d'uso critici.
L'accuratezza di rilevamento della posizione è di 194,3 arcsec (che corrisponde a una rotazione meccanica di 0,0539°) in funzione della geometria della scheda PCB. Ciò è dovuto in larga misura al fatto che il dispositivo dispone di tre ingressi di ricezione (contro gli 8 del NCS32100) e non supporta le configurazioni che prevedono le bobine di rilevamento accurato e grossolano. Entrambi questi dispositivi possono funzionare come encoder rotativi o encoder lineari.
Sensori del pedale del freno, sensori del pedale dell'acceleratore, sensori di posizione del motore, sensori del sistema frenante, sensori di livello del veicolo, sensori TRS (Transmission Range Sensor), utilizzati per rilevare la velocità della trasmissione), sensore di posizione della valvola a farfalla e sensori di ricircolo dei gas sono le applicazioni tipiche del modello NCV77320.
Analogamente al modello NCS32100, anche il modello NCV77320 è insensibile alla contaminazione, alle variazioni di temperatura e alle interferenze magnetiche. Può essere utilizzato in applicazioni automotive nell'intervallo di temperatura compreso tra -40 ºC e +150 ºC. In grado di funzionare a velocità di rotazione fino a 10.800 giri al minuto, il modello NCV77320 comunica con la MCU di supporto tramite interfacce SENT, SPI o analogica.
In conclusione
All'aumentare della diffusione dell'automazione, cresce la necessità di poter rilevare la posizione di motori rotanti. Per espletare tale operazione sono disponibili diverse tecnologie, tra cui quella ottica, magnetica e induttiva. La prima assicura un'elevata precisione, ma è costosa e sensibile all'azione di agenti contaminanti mentre la seconda, molto più economica, è facilmente influenzabile dai campi magnetici.
Per tali motivi l'interesse si sta concentrando sulla tecnologia induttiva. Grazie all'introduzione dei sensori a doppia induzione, è ora possibile realizzare sensori in grado di fornire l'accuratezza tipica della tecnologia ottica a costi decisamente più competitivi.