



")
Il sistema di sicurezza sBot Speed di SICK è una soluzione completa pronta per l’integrazione, costituita da un laser scanner di sicurezza S300 mini e da una centralina configurabile di sicurezza FlexiSoft. Oltre a funzioni di automazione e sicurezza preconfigurate e testate, offre schemi di cablaggio, consentendo un’integrazione semplice e veloce con il comando del robot. La variante di sistema sBot Speed-UR è perfetta per diversi modelli di robot di Universal Robot (UR), ma sono disponibili ulteriori varianti per altri produttori di robot.
 Accesso aperto alla zona di pericolo con protezione delle persone
Accesso aperto alla zona di pericolo con protezione delle persone
{kind=link}
Le applicazioni di robot cooperativi, in cui uomo e macchina si dividono lo stesso spazio di lavoro in momenti diversi, per esempio per processi di montaggio, consentono un adattamento flessibile a condizioni di lavoro o ambiente variabili. In questa situazione i sistemi di sicurezza devono garantire un accesso sicuro alla zona pericolosa del robot.
Contemporaneamente devono supportare l’efficienza di processo e la produttività dell’interazione uomo-robot, ad es. mediante una capacità di adattamento che consenta di regolare automaticamente le condizioni di funzionamento del robot in funzione alla posizione delle persone nell’ambiente. Questo previene il rischio di incidenti migliorando al tempo stesso la produttività, riducendo i fermi macchina ed ottimizzando il lavoro.
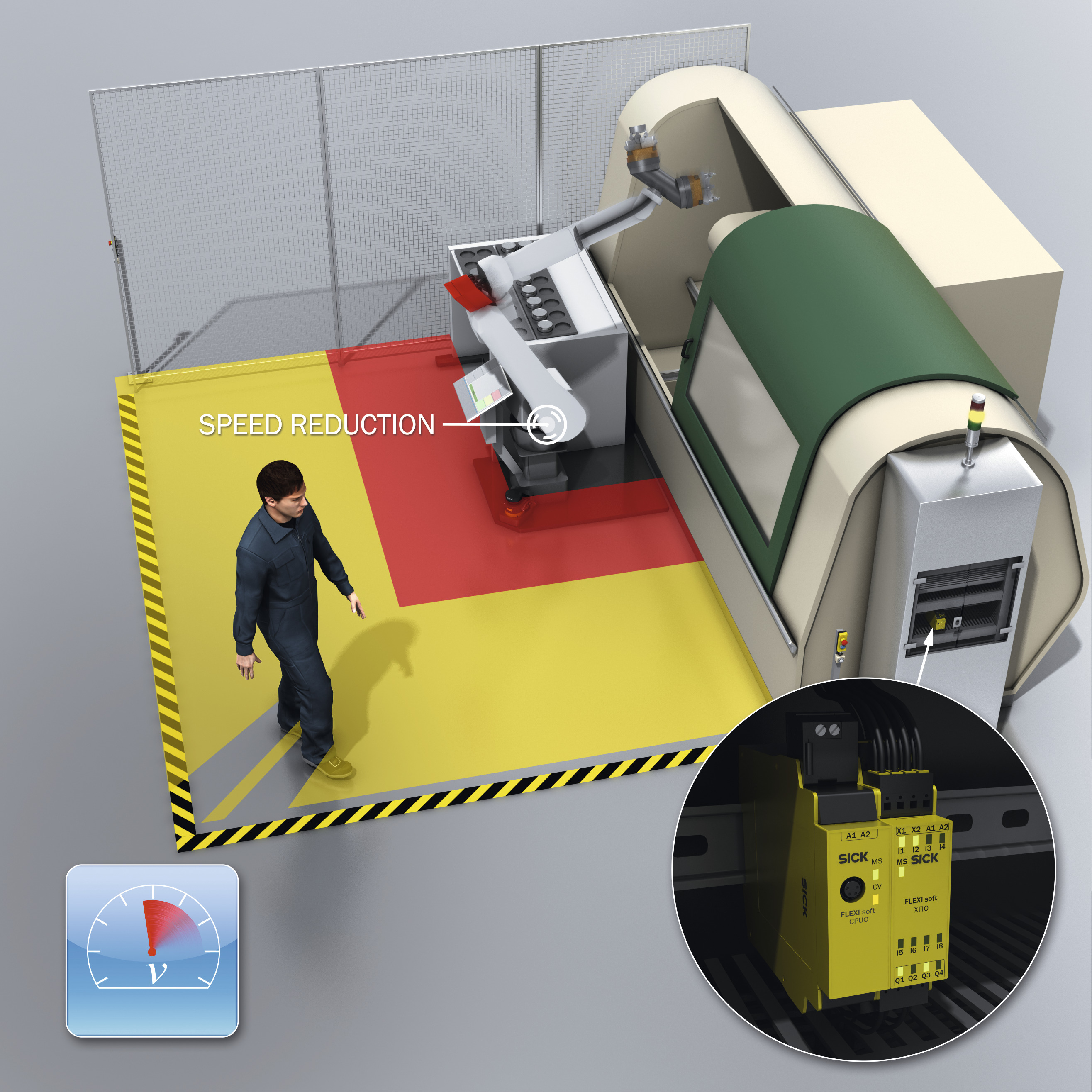
Ed è proprio questa la filosofia seguita dal sistema di sicurezza sBot Speed di SICK. Un laser scanner di sicurezza S300 mini sorveglia l’area di lavoro del robot. Lo scanner utilizza due set di campi dipendenti dalla velocità del robot, ciascuno costituito da un campo di preallarme e da un campo protetto.
Se una persona accede nel campo di preallarme del set di campi 1, durante una fase di operatività, il robot riduce la sua velocità. Poiché a questo punto il robot si muove più lentamente e di conseguenza presenta un tempo di fermata più breve in caso di arresto di emergenza, il sistema di sicurezza attiva il set di campi 2 con un campo di protezione più piccolo. Se qualcuno vi accede, il robot si arresta. Quando la persona si allontana nuovamente dall’area di lavoro, il robot riparte automaticamente, inizialmente solo a velocità ridotta monitorato con il set di campi 2, per poi riacquisire la velocità operativa originaria monitorato dal set di campi 1.
Minor numero di fermi e maggiore produttività
Il sistema di sicurezza sBot Speed consente di adattare le condizioni di funzionamento dei robot se delle persone si trovano nella sua area di lavoro. Rispetto ad un arresto completo eall’interruzione della produzione, riduzione di velocità monitorata in sicurezza significa maggiore produttività e disponibilità grazie ad una interazione uomo-robot ottimizzata. La regolazione di frenata ed accelerazione a due stadi, con riavvio automatico,riducono l’usura del robot e degli azionamenti, favorendone così una maggiore durata.
sBotSpeed-UR, pronto all’uso per robot di Universal Robots
Con lo sviluppo della soluzione sBot Speed ottimizzato per robot di marche e serie diverse, SICK fa un passo avanti decisivo in termini di integrazione di sistema. La variante sBot Speed-UR è adattata in modo specifico per l’impiego con robot di Universal Robot delle serie UR3, UR5 e UR10.
Questi aspetti riguardano per esempio il cablaggio specifico per UR, la descrizione ed il collegamento di componenti di sicurezza supplementari necessari per soddisfare le normedi sicurezza di riferimento. Inoltre,gli schemi di collegamento, la configurazione per la centralina configurabile di sicurezza, le impostazioni di parametri legati a UR e il file Sistema sono contenuti nella documentazione.
L’adattamento specifico per robot UR riguarda anche le modalità operative selezionabili “Running mode”e “Programming mode”. Il sistema di sicurezza sBot Speed-UR consente a chi si occupa della messa in funzione o all’operatore, in fase di messa a punto del robot o, in caso di modifiche di funzioni, di programmare il robot e di muoversi in sicurezza, per esempio per l’apprendimento di punti di presa.
Il sistema di sicurezza sBot Speed e la variante di sistema sBot Speed-UR sono già disponibili –come anche ulteriori varianti per l’utilizzo con robot di altri produttori.