




{kind=link}
 La robotica ha come obiettivo lo studio di sistemi meccatronici, sistemi cioè in cui coesistono componenti meccaniche, elettroniche ed informatiche, in grado di compiere autonomamente attività fisiche e/o decisionali.
La robotica ha come obiettivo lo studio di sistemi meccatronici, sistemi cioè in cui coesistono componenti meccaniche, elettroniche ed informatiche, in grado di compiere autonomamente attività fisiche e/o decisionali.
Nell’ultimo trentennio la robotica ha stimolato un interesse sempre più crescente motivato sia dal carattere interdisciplinare della materia, sia dal numero e dalla varietà di possibili applicazioni in ambiti anche molto diversi tra loro: da quello industriale (la robotica industriale è ad oggi la maggiore applicazione commerciale tra le tecnologie robotiche) a quello domestico (robotica di servizio) e biomedico, fino ad arrivare all’esplorazione e al soccorso (search and rescue) con la robotica per l’esplorazione.
Nonostante la robotica sia tuttora una disciplina relativamente giovane, i suoi fondamenti teorici sono oramai ben consolidati. Tra questi, la modellistica (ovvero la descrizione matematica di un sistema robotico), la pianificazione delle traiettorie ed il controllo rivestono un ruolo basilare nella comprensione del funzionamento, dei limiti e delle capacità di un robot e quindi nel suo utilizzo.
L’obiettivo di Didattica nella robotica è proprio quello di fornire al lettore una panoramica esaustiva su tali conoscenze attraverso un percorso di approfondimento espressamente dedicato alla robotica industriale che si svilupperà nei prossimi numeri.
I temi trattati
I contenuti di Didattica nella robotica sono organizzati in nove articoli, ciascuno dedicato ad uno specifico argomento.
1. La robotica industriale
Un robot è un sistema complesso che può essere scomposto in una serie di sotto-sistemi interconnessi. In questo numero verranno presentate le componenti di un sistema robotico e verrà descritta in dettaglio la struttura meccanica di un manipolatore. Verranno poi evidenziate le caratteristiche di un robot industriale, le strutture meccaniche di riferimento e le applicazioni tipiche.
2. La cinematica di un robot - Parte 1.
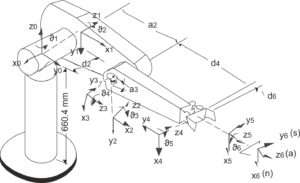
La cinematica, quel ramo della meccanica che si occupa di descrivere quantitativamente il moto dei corpi (indipendentemente dalle cause che lo hanno generato), permette in robotica di esprimere la relazione esistente tra la posizione e l’orientamento dell’organo terminale (end-effector) di un robot, e la configurazione della sua struttura meccanica. Questa materia gioca un ruolo fondamentale per il controllo del moto dell’organo terminale (e quindi dell’oggetto movimentato dal sistema robotico) e per la per la determinazione dello spazio di lavoro. In questo numero verrà introdotta la cinematica dei manipolatori robotici, facendo riferimento alla convenzione di Denavit-Hartenberg. Verrà quindi spiegato cosa si intende per cinematica diretta e cinematica inversa, fornendo alcuni esempi di strutture meccaniche ricorrenti in ambito industriale.
3. La cinematica di un robot - Parte 2.
Questo numero completerà la descrizione della cinematica dei manipolatori robotici presentando la cinematica differenziale, ovvero la relazione tra la velocità con cui la struttura meccanica di un robot cambia configurazione e la velocità dell’organo terminale. Questa relazione è descritta da una matrice chiamata Jacobiano. Lo Jacobiano è uno degli strumenti più importanti nella caratterizzazione di un manipolatore poiché interviene ad esempio nell’individuazione delle singolarità cinematiche e nell’analisi della ridondanza. Particolare attenzione verrà dedicata proprio al concetto di ridondanza, uno degli aspetti caratterizzanti dei moderni robot collaborativi (Cobot) sia a singolo che a doppio braccio.
4. La dinamica di un robot
A differenza della cinematica, la dinamica di un robot studia le cause che generano il moto del manipolatore. Questa materia ha un ruolo fondamentale per la simulazione del moto, per il progetto meccanico di prototipi e per la sintesi degli algoritmi di controllo. In questo numero verrà spiegato cosa si intende per modello dinamico di un robot, facendo riferimento ai due possibili approcci con cui può essere ricavato. Verranno poi evidenziate le proprietà notevoli del modello dinamico, tra cui la proprietà di linearità nei parametri dinamici. Infine verrà chiarito il significato di dinamica diretta e dinamica inversa.
5. Attuatori e sensori
Questo numero sarà dedicato alla presentazione degli attuatori e dei sensori comunemente adottati nei robot industriali. Dopo aver illustrato le caratteristiche generali di un sistema di attuazione, verranno presentate le sue modalità di controllo. Verranno poi descritti i sensori di maggiore uso in robotica, distinguendo tra i sensori cosiddetti propriocettivi (tra cui gli encoder) e i sensori esterocettivi (ad esempio i sensori di forza).
6. Pianificazione delle traiettorie
Obiettivo della pianificazione di traiettorie è quello di calcolare (ma non di eseguire) il moto che la struttura meccanica di un robot dovrà compiere per passare da una configurazione iniziale ad una finale. In questo numero verranno illustrate le tecniche per la pianificazione di traiettorie, distinguendo tra pianificazione di traiettorie nello spazio dei giunti e nello spazio operativo. Infine verrà mostrato qualche esempio di programmazione del moto di un robot.
7. Controllo del moto
Affinché il robot possa compiere il moto generato dalla pianificazione di traiettorie è necessaria la presenza di un sistema di controllo del moto, argomento trattato in questo numero. Obiettivo del controllo di moto è quindi quello di assicurare l’esecuzione da parte del manipolatore delle traiettorie pianificate. In questo numero verrà chiarita la distinzione tra strategie di controllo decentralizzato e strategie di controllo centralizzato. Con riferimento alle prime, particolare attenzione verrà dedicata al controllo indipendente ai giunti che trova applicazione proprio nei robot industriali.
8. Controllo di forza
Tra le applicazioni robotiche tipiche in ambito industriale, la fresatura e la sbavatura implicano un contatto e quindi un’interazione tra robot e ambiente. Tale interazione può essere descritta in maniera significativa dalla forza di contatto applicata all’organo terminale del manipolatore e misurabile attraverso un sensore di forza. Come verrà spiegato, uno dei requisiti fondamentali per una corretta esecuzione di queste lavorazioni consiste proprio nella capacità di gestire la forza di contatto. Si parla in questo caso di controllo di forza. Verranno quindi presentati gli schemi di controllo di forza più comunemente adottati nei robot industriali.
9. Controllo visuale
Come ultimo argomento trattato da Didattica nella robotica verrà mostrato come le informazioni sull’ambiente in cui opera un sistema robotico, acquisite tramite visione, possano essere utilizzate all’interno dell’ algoritmo di controllo del robot, quello che viene comunemente denominato controllo visuale. In questo numero conclusivo verranno descritte le componenti di un sistema visuale, fornendo qualche nozione di elaborazione dell’immagine. Verranno infine illustrate le due principali strategie di controllo visuale, ovvero nello spazio operativo e nello spazio delle immagini.