




{kind=link}
 Le mani robotiche realizzate a imitazione di quella umana si stanno evolvendo molto velocemente e presto troveranno applicazioni pratiche sia in campo industriale e di servizio sia sociale. Intanto alcune aziende stanno lavorando su altre soluzioni. Tra queste Empire Robotics con il Versaball, che è già disponibile.
Le mani robotiche realizzate a imitazione di quella umana si stanno evolvendo molto velocemente e presto troveranno applicazioni pratiche sia in campo industriale e di servizio sia sociale. Intanto alcune aziende stanno lavorando su altre soluzioni. Tra queste Empire Robotics con il Versaball, che è già disponibile.
In questo momento il segmento degli strumenti di fine braccio del robot (EOAT – End Of Arm Tooling), che è anche una delle parti più critiche di qualsiasi applicazione robotica, è in grande fermento. La varietà e la complessità degli oggetti che i robot dovrebbero manipolare e la necessità di soluzioni più facili da usare stanno portando a un cambiamento radicale, dando vita a nuove tecnologie e fornitori. Inoltre, l’aumento delle richieste per avere velocità maggiormente elevate e ridurre i consumi energetici sta spingendo i principali produttori a mettersi sempre più in gioco. Attualmente nell’industria, in particolare quella manufatturiera, sono utilizzati semplici ma robusti attuatori a pinza a due o tre dita, ma in un futuro non troppo lontano complesse “mani” a cinque dita saranno in grado di svolgere anche compiti che richiedono una delicatezza e un’accuratezza estreme. Gli eccezionali progressi nel campo della microelettronica e della micromeccanica consentono oggi di realizzare mani robotiche in cui ogni dito è comandabile separatamente e le articolazioni riproducono fedelmente quelle umane. Le visioni futuristiche di dispositivi prensili altamente sensibili, dotati come l’essere umano di pollici e di altre dita, sono quindi una realtà anche se prevalentemente ancora a livello di prototipi.
I robot con le mani
Le prime “mani” robotiche sono state sviluppate in parte per imitare il modo di afferrare dell’essere umano, ma soprattutto per funzionare in ambienti industriali dove la velocità e la forza di questa operazione erano obiettivi primari. Più recentemente la ricerca&sviluppo si è concentrata soprattutto sull’emulazione della capacità umana di raccogliere, maneggiare e spostare oggetti piccoli e fragili in ambienti non strutturati e fuori dalla gabbia di sicurezza in fabbrica. Molti di questi robot sono stati sviluppati per l’utilizzo con le persone sia in ambienti industriali sia nelle case e nelle strutture specializzate come robot di servizio per le persone anziane o disabili. Questo richiede che siano più piccoli, più sicuri e vicini al “comportamento umano” a un livello molto elevato. Gli ingegneri, sviluppando le più recenti mani robotiche, hanno ripensato il design per renderle molto simili a quelle dell’essere umano. La nuova generazione riprende i modelli cinematici della mano umana con una forma simile, dove sensori tattili, e talvolta anche ottici, e un elevato grado di libertà (DOF – Degrees Of Freedom) sono fondamentali. Molte hanno interfacce industriali standard e possono essere utilizzati come strumento per operazioni a distanza o montati su una serie di bracci robotici come parte di un sistema più complesso. Alcune saranno presto disponibili in commercio, molte sono stati sviluppate come prototipi, e altre sono ancora nella fase di ricerca&sviluppo. Sulla base della DLR Hand II, il German Aerospace Center (DLR) e l’Harbin Institute of Technology (HIT), hanno sviluppato congiuntamente la DLR/HIT Hand II: una mano robotica con multisensori e cinque dita, ciascuna con tre attuatori, che sono tutte identiche tranne una che ha un motore aggiuntivo per farla funzionare come pollice opponibile. Per emulare completamente le funzioni motorie delle dita umane, ciascun dito ha quattro articolazioni, non tre, e ognuna ha sensori di forza e di posizione. La DLR/HIT Hand II offre complessivamente 15 gradi di libertà (DOF), rispetto ai 13 della precedente. Le dita hanno un rivestimento antiscivolo per la presa sicura, e l’integrazione di motori ed elettronica è stata studiata per semplificare il montaggio su una vasta gamma di bracci robotici.
Mano umanoide
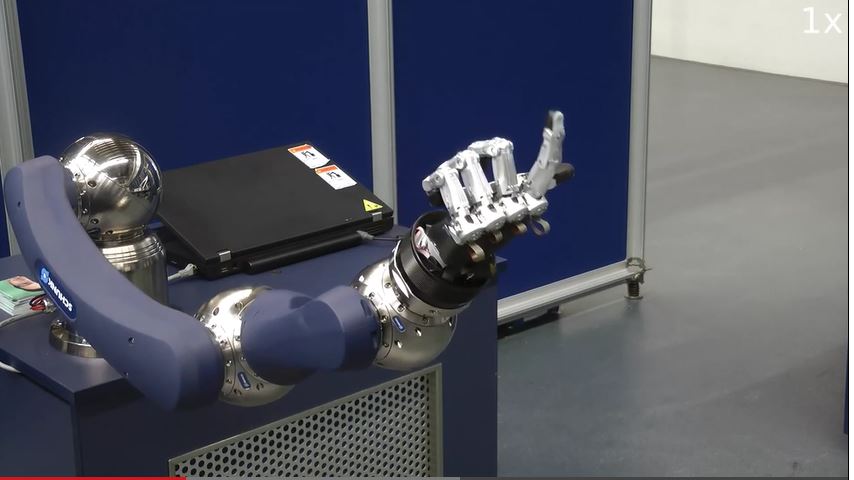
L’Anthropomorphic Schunk 5-Finger-Hand, prodotta dall’azienda americana Schunk, è una prodezza di ingegneria: un dispositivo antropomorfo di manipolazione che vanta nove motori servo elettrici che controllano venti assi, o articolazioni. «È simile a una mano umana, non solo nelle dimensioni e proporzioni», afferma RJ Ruberti, Team Leader of Linear Systems alla Schunk, “ma in tutti i movimenti e nella destrezza”. Con l’aiuto di un braccio a sei gradi di libertà compie dei gesti – per esempio, muove le dita per indicare “vieni da me” oppure punta un dito verso una cosa, afferra un oggetto e riesce anche a contare fino a tre. Anche se innegabilmente affascinante, la mano a cinque dita, secondo Ruberti, è ancora lontana dall’impiego in fabbrica. Questa soluzione è in gran parte orientata verso la robotica di servizio, settore in via di sviluppo, e gli sforzi in ricerca&sviluppo vanno in tale direzione. «La maggior parte di queste mani robotiche sarà studiata dalle università. Non sono ancora pronte per essere vendute alle fabbriche per applicazioni di automazione. Se però si arriverà al punto di riuscire a produrle in serie e a costi accessibili, è possibile che possano trovare impiego in questo ambito», spiega Ruberti, «Abbiamo anche una mano a tre dita, ognuna dotata di cuscinetti con sensori tattili, così quando prende qualcosa si può effettivamente vedere dove le dita stanno afferrando la parte». Ha un design più robusto ed è stata creata appositamente per applicazioni industriali, quali la robotica di servizio. «È semplice scegliere una pinza per gestire solo una parte», continua il manager di Schunk, «ma diventa difficile farlo quando si ha a che fare con un certo numero di parti diverse, o che possono essere simili ma con dimensioni differenti. La difficoltà sta anche nel capire quanti diversi attuatori finali sono necessari per gestire una determinata gamma di pezzi. Disponiamo di varie soluzioni. Abbiamo il sistema per fare in modo che il robot passi rapidamente da uno strumento a un altro: un cambio veloce delle dita da presa per passare da un set di dita a un altro in una manciata di secondi».
Soluzione innovativa
Mentre i principali produttori di strumenti di fine braccio (EOAT – End Of Arm Tooling) per i robot stanno cercando di rimanere tecnologicamente al top, altri stanno cambiando completamente le regole. Quello che è stato realizzato dal Creative Machines Lab della Cornell University, per esempio, è un attuatore finale innovativo. Si tratta del Versaball, un kit prodotto in piena regola e già commercializzato da Empire Robotics, nata nel 2012 come spin-off dell’università, per il settore dell’automazione industriale. «In pratica si ha del materiale granulare inserito all’interno di una membrana sferica», spiega John Amend, Chief Technology Officer della sede di Boston di Empire Robotics, «Per fluidificarlo e renderlo morbido viene pompata dell’aria, quindi si avvicina la sfera all’oggetto in modo che lo avvolga e ne prenda quasi la forma». Amend poi descrive come il vuoto venga utilizzato per contrarre il materiale granulare (si pensi all’effetto che si ha, per esempio, nel caffè macinato sottovuoto), che si irrigidisce rapidamente per afferrare saldamente il pezzo. Successivamente, si ricorre nuovamente alla pressione positiva per invertire la transizione, restituendo alla sfera uno stato deformabile che consenta il rilascio dell’oggetto. «La tecnologia alla base del Versaball funziona sostanzialmente come la transizione vetrosa», precisa il manager, «È una transizione da uno stato liquido a uno solido ‘disordinato’. La cosa interessante, pensando a come viene prodotta una pinza come questa, è che basta un cambiamento molto piccolo di volume, senza che sia necessaria alcuna variazione di temperatura, per ottenere un grande cambiamento nella durezza del materiale. Così, quando è morbido, la pinza è solo l’uno per cento più grande rispetto a quando è duro». Il sistema è stato utilizzato per afferrare e spostare di tutto: dalle bottiglie di plastica ai bicchieri, dagli smartphone ai pezzi di vetro, persino un uovo crudo. Empire Robotics sta sperimentando varie texture per la sua “sfera” e potrebbe realizzare modelli speciali per diverse applicazioni, anche grazie all’evoluzione dei materiali granulari. Il kit disponibile attualmente in commercio contiene una sfera da 3,5 e una da 6,5 pollici. L’azienda sta prendendo in considerazione anche altre dimensioni e sta valutando applicazioni specifiche, come cibo, protesi, e persino quelle subacquee. Sono tutte possibilità che attualmente si trovano in varie fasi di sviluppo in laboratorio.