




{kind=link}
Camminare su due gambe è un'azione complessa che richiede un controllo preciso. Perfino gli esseri umani hanno bisogno di almeno un anno per imparare questa sequenza apparentemente semplice di movimenti e riuscire a coordinare circa 200 muscoli, diverse articolazioni complesse e varie aree specializzate del cervello.
Per via dei rapporti di leva sfavorevoli dei robot umanoidi, un motore dalle dimensioni ridottissime deve sviluppare quanta più coppia possibile per riprodurre un movimento anche simile a quello degli esseri umani.
Mentre i robot tradizionali sono in genere utilizzati in ambienti altamente strutturati, quali la produzione industriale o la logistica, i robot umanoidi irrompono anche in un campo del tutto inedito: la vita quotidiana. Devono riuscire a orientarsi in ambienti non strutturati, in cui, ad esempio, un salotto non sarà mai uguale a un altro e ogni compito è personalizzato. Nell'interazione diretta con le persone, agiscono in modo meno astratto, ma sono piuttosto presenti fisicamente, spesso a distanza ravvicinata.
Robot umanoidi, dagli ambienti di fabbrica a quelli domestici, una risorsa preziosa per compiti ripetitivi
I robot umanoidi costituiscono il punto di contatto fra l'intelligenza artificiale e il mondo reale. Oltre a elaborare le informazioni digitali, riescono a tradurle in azioni concrete.
Se la sequenza di movimenti risulta corretta e sicura, i robot umanoidi sono in grado di svolgere una serie di attività finora riservate agli umani, ad esempio in ambienti pericolosi, a diretto contatto con le persone o nell'ambito di processi ripetitivi. Aiutano nei lavori domestici, forniscono supporto nella riabilitazione, interagiscono con gli anziani o trovano impiego nel commercio al dettaglio. I loro punti di forza risiedono nella versatilità e adattabilità agli ambienti umani.
Il ruolo degli azionamenti per i robot umanoidi
Al centro di ogni movimento eseguito dai robot umanoidi c'è un sistema di azionamento preciso: è questo che decide con quanta delicatezza sollevare un braccio, quanto velocemente debba reagire un arto o con quanta forza debba stringere la presa un dito. Pertanto, la tecnologia di azionamento è strettamente legata alle prestazioni, alla naturalezza e alla sicurezza dei movimenti dei robot umanoidi.
In questo ambito, la miniaturizzazione, l'efficienza energetica, la dinamica e la precisione sono requisiti fondamentali. Un connubio che può funzionare solo con micromotori altamente sviluppati.
Tutti questi aspetti risultano decisivi non solo nella robotica, ma anche nelle protesi. Dai robot umanoidi alle protesi, il passo è breve. Le protesi moderne, in particolare le protesi per braccia o mani, riproducono i movimenti del corpo umano, sfruttando principi simili a quelli dei robot umanoidi. Elettromotori, sensori e un controllo preciso consentono movimenti intuitivi e potenti.
In entrambi i casi è fondamentale la perfetta simbiosi fra tecnologia e biologia, sia che si tratti di potenziare le abilità umane, sia di sostituire funzioni perse.
FAULHABER: in prima linea con gli azionamenti per il futuro dei sistemi robotici umanoidi
Oltre a essere utilizzati nei robot umanoidi, i micromotori trovano impiego da tempo anche negli ausili robotizzati quali le protesi motorizzate per mani e gambe. E la ragione è sotto gli occhi di tutti: soddisfano, infatti, i più elevati requisiti in applicazioni altamente delicate ed esigenti.
FAULHABER sviluppa e produce sistemi di azionamento ad alta precisione installati in tutto il mondo, sia nelle protesi moderne, sia nei robot umanoidi. Utilizzati per movimenti fini delle dita o energetici passi in avanzamento, i motori consentono la massima mobilità negli spazi più ridotti. Ciò risulta particolarmente utile nei movimenti dinamici necessari a riprodurre i gesti dell'uomo.
Sicurezza prima di tutto
Gli aspetti legati alla sicurezza e l'ottimale controllabilità sono di primaria importanza perché questi sistemi interagiscono sempre più direttamente con le persone. Per consentire una cooperazione uomo-macchina senza intoppi e soprattutto sicura, è fondamentale sviluppare concetti idonei.
Non si tratta solo del controllo software. I meccanismi di protezione devono essere integrati nella soluzione di azionamento stessa. FAULHABER prende molto sul serio questa necessità, fornendo soluzioni di azionamento che sono potenti e compatte e, contemporaneamente, progettate per garantire la sicurezza. Ideali, perciò, per i complessi compiti tipici della robotica e della tecnologia medicale.
A livello pratico, questo consente di sopportare carichi brevi ma estremi senza pregiudicare la vita utile dei componenti. Grazie alla stretta collaborazione con istituti di ricerca e partner di sviluppo leader, la tecnologia FAULHABER è sempre all'avanguardia.
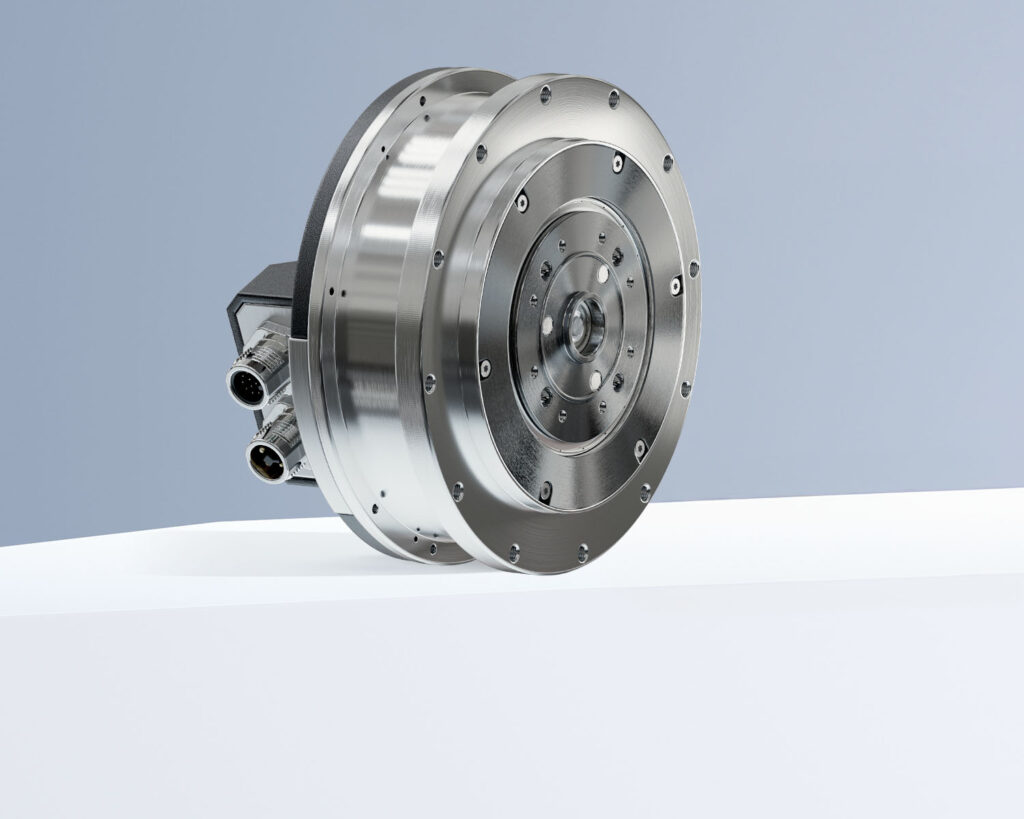
Un esempio: il sistema di azionamento integrato FAULHABER BXI
Fra le tecnologie di azionamento disponibili, per le applicazioni con movimenti dinamici e antropomorfi, in ambito robotico, FAULHABER propone il sistema di azionamento integrato BXI.
Il motore a rotore interno della serie 9317 BXI G combina robustezza e compattezza, definendo nuovi standard di riferimento nel campo dei sistemi di azionamento integrati nella robotica. Con una coppia massima di 20 Nm, consente movimenti dinamici, tempi di reazione rapidi e un controllo del movimento ad altissima precisione.
Il motore copre un intervallo di tensione fino a 50 V e, grazie alle interfacce disponibili e a una lunghezza di soli 34 mm, può essere facilmente integrato in esistenti architetture di sistema.
Il BXI è quindi particolarmente adatto per applicazioni in cui ogni millimetro, ogni grammo e soprattutto un'elevata densità di potenza sono determinanti, ad esempio come azionamento articolare compatto per robot umanoidi.
Prestazioni massime nel minimo volume
Questo sistema di azionamento costituisce un'unità funzionale composta da motore, riduttore planetario a stadi integrato ed encoder ad alta risoluzione. Il suo punto di forza risiede nell'integrazione sistematica: massime prestazioni e ingombro minimo. La carcassa piatta in alluminio, oltre a proteggere dalla corrosione, contribuisce a una dissipazione termica ottimizzata.
La struttura a rotore interno con 21 coppie di poli, statore scanalato e avvolgimento con nucleo in ferro garantisce un cogging ridotto e un'elevata densità di coppia. L'encoder assoluto SSI integrato a 15 bit, dotato di line driver e algoritmo di compensazione, garantisce un posizionamento altamente preciso, offre un'elevata resistenza alle interferenze e contribuisce in modo significativo all'affidabilità e alla precisione dell'intero sistema.
Perfetta integrazione motori + azionamenti
In combinazione con il controllo di posizione MC5010 di FAULHABER, si ottiene un sistema completo perfettamente coordinato adatto ad applicazioni di posizionamento ad alta precisione e sensibili alla coppia.
Allo stesso tempo, motore e azionamento sono protetti in modo affidabile, mentre la messa in servizio risulta particolarmente semplice ed efficiente grazie al software Motion Manager.
Il BXI di FAULHABER rappresenta quindi una soluzione performante e orientata al futuro per applicazioni robotiche esigenti in cui innovazione, applicazione e nuove tecnologie interagiscono in perfetta armonia.