

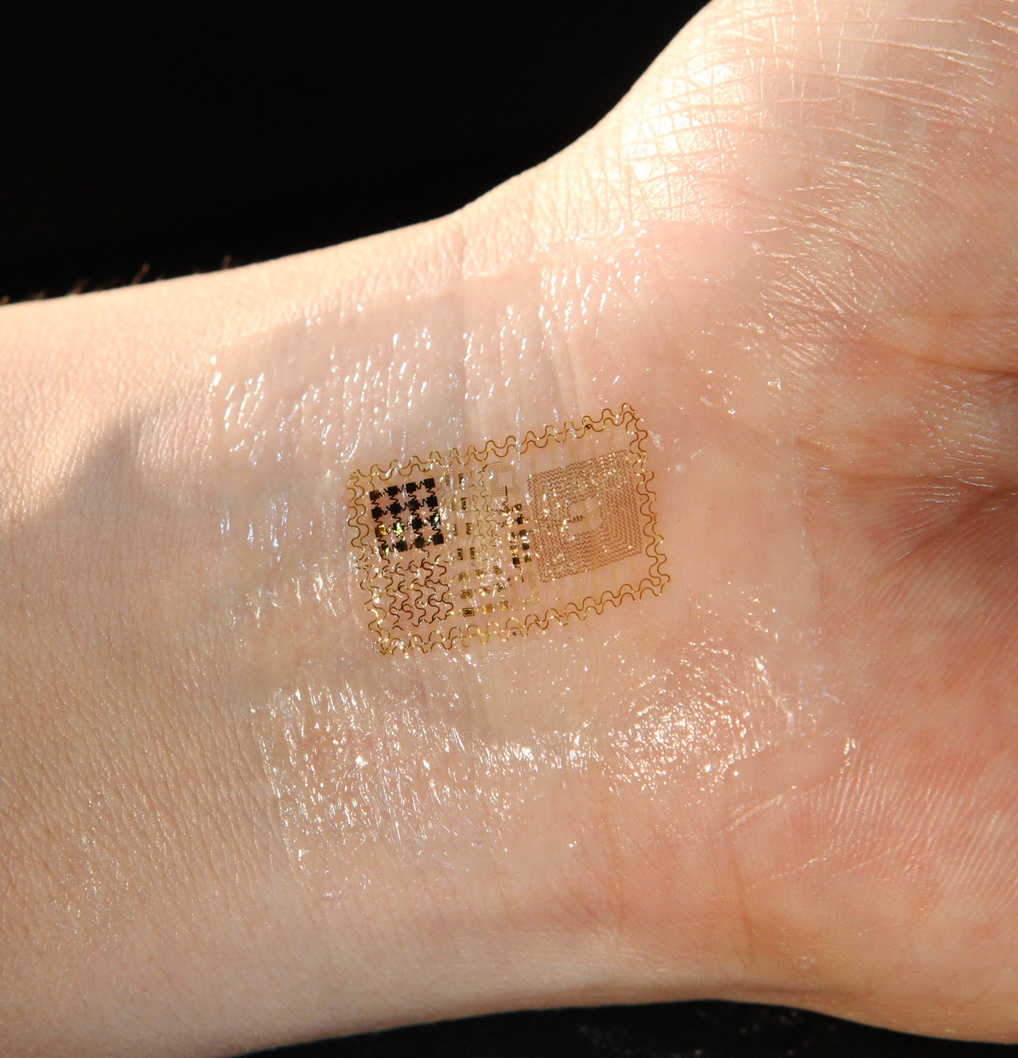
 Nuovi materiali e nuove strategie di fabbricazione di dispositivi basati su componenti elettronici e sensori estensibili consentono di ipotizzare in un futuro non molto lontano la disponibilità di circuiti flessibili applicabili su qualsiasi superficie.
Nuovi materiali e nuove strategie di fabbricazione di dispositivi basati su componenti elettronici e sensori estensibili consentono di ipotizzare in un futuro non molto lontano la disponibilità di circuiti flessibili applicabili su qualsiasi superficie.
I circuiti flessibili rappresenteranno la base per importanti innovazioni in molteplici campi, ma i maggiori benefici saranno per la robotica, dove, grazie a quella che viene definita “electronic skin” (e-skin), sarà possibile un nuovo livello di manipolazione di oggetti e di interazione con l’ambiente circostante da parte di sistemi robotizzati, ampliandone l’utilizzo a contesti applicativi anche non necessariamente industriali. In pratica, si sta arrivando al momento in cui parlare di senso del tatto per un robot non è più oggetto di considerazioni teoriche o sperimentazioni accademiche, e con questo articolo proponiamo al lettore una sintesi delle attuali linee di sviluppo dei sistemi tattili artificiali.
Alcune considerazioni teoriche
La pelle umana, che si configura come sensore sia di pressione che di temperatura, è ovviamente il riferimento di performance nello sviluppo di un sistema tattile artificiale, e un primo aspetto affrontato dai ricercatori è stato quello di conferire le stesse proprietà meccaniche all’equivalente artificiale partendo da materiali quali nanotubi di carbone, grafene, nanofili e materiali attivi sia organici che basati su polimeri. La pelle umana può distendersi e piegarsi senza danno alcuno, e se i sottili substrati plastici utilizzati per realizzare array di elettronica flessibile non pongono particolari problemi al riguardo, ben diverso il discorso per gli “strectchable device”, cioè allungabili e resistenti a tensioni e stiramenti in direzioni diverse, la cui realizzazione impone o l’uso di materiali che intrinsecamente abbiano queste proprietà oppure una progettazione che individui configurazioni geometriche appropriate di materiali convenzionali. Oltre alle proprietà meccaniche, di pari importanza per una e-skin è l’aspetto sensoriale, il che comporta la progettazione di sensori tattili di elevata sensibilità che consentano di avvicinarsi il più possibile alle capacità della pella umana, che si possono così sintetizzare: sensibilità come forza necessaria per afferrare e manipolare un oggetto determinandone l’orientamento; monitoraggio di tensione elastica per autopercezione di posizione relativa, essenziale per movimenti semplici quali l’alzarsi o il camminare; sensibilità riferita alla forze elastica trasversale per controllo di presa e valutazione degli effetti di frizione; percezione di vibrazioni e valutazione di effetti di scivolamento. Queste capacità rappresentano i requisiti minimi per una e-skin che consenta un’interazione “human-like” con il mondo circostante. Da aggiungere un’ulteriore sfida: come arrivare a processi costruttivi di dispositivi flessibili non tanto a livello singolo ma in quantità, quindi su aree abbastanza ampie, tipo i wafer dei circuiti integrati, per conferire economicità e ripetibilità ai processi produttivi della futura e-skin.
La raccolta dei dati
Attribuire una capacità tattile a un’entità artificiale presuppone una ragguardevole quantità di sensori distribuiti su un’area abbastanza estesa, il che impone lo sviluppo di adeguate metodologie per raccogliere ed elaborare la conseguente non trascurabile quantità d’informazioni rese disponibili. La tendenza è quella di associare al condizionamento dei segnali a livello di singolo device, un data processing a livello intermedio per ottimizzare il volume di dati da sottoporre al controllo centrale. Nel caso della pelle umana i dati raccolti da un gruppo di neuroni sono via via elaborati durante il loro flusso verso il cervello, e questo ha suggerito un approccio modulare basato su gruppi di sensori a loro volta aggregabili in gruppi più grandi, in modo che una capacità elaborativa implementata in ciascun modulo permetta elaborazione di segnali e analisi dati nell’ambito della stessa rete di sensori, approccio questo che rende possibili ampliamenti della rete secondo necessità.
Perché non andare oltre?
L’obiettivo delle ricerche non è esclusivamente quello di emulare la pelle umana, operazione che oggettivamente non può che avere dei limiti essendo impossibile ottenere un equivalente sintetico al 100%, ma anche quello di “andare oltre”, una volta raggiunte le prestazioni massime possibili secondo un’ottica di utilizzo fruibile in applicazioni industriali, per sistemi robotizzati. Quindi cosa significa andare oltre? Significa una e-skin “aumentata”, con prestazioni che la pelle umana non possiede ma che possono essere aggiunte in un equivalente artificiale con l’integrazione di sensori chimici e biologici. La base concettuale di questo approccio tecnologico deriva dalla constatazione che vi è una domanda importante di sensori estremamente miniaturizzati, portatili e a basso costo per monitoraggi di varia natura: agenti inquinanti nell’ambiente, sostanze chimiche e biologiche nocive, fino ad arrivare alla discriminazione di determinate proteine e ai marcatori biologici per diagnosi mediche. Pensare a un braccio robotizzato che toccando un liquido possa trasferire a un sistema vocale l’informazione della presenza di una data malattia, al di là del senso pratico della cosa, allo stato delle ricerche non è completamente illusorio. Attualmente sono disponibili prototipi di sensori chimici e biologici a base elettronica su substrati rigidi per gas e liquidi, e in questi casi si inizia a parlare di e-nose (naso elettronico) per i primi, ed e-tongue (lingua elettronica) per i secondi. La sfida è quella di passare a un’implementazione su substrati che siano flessibili, condizione per un’integrazione con la e-skin, che in questo caso diventerebbe una sorta di “super skin”, in cui incorporare un’ampia gamma di funzionalità diverse. Altro aspetto interessante riguarda l’alimentazione elettrica della rete di sensori integrata in una e-skin. Ovviamente si può pensare a collegamento con batterie o con la normale rete elettrica, ma iniziano a essere disponibili prototipi di celle solari flessibili e anche allungabili lungo due assi senza che venga meno la loro capacità di produrre energia, e in tal modo la e-skin diventerebbe anche energicamente autonoma per la trasmissione dati.
Materiali organici e inorganici
Come prima detto, la base di una pelle artificiale è rappresentata da transistor organici flessibili, realizzati con polimeri flessibili e materiali a base di carbonio. Per realizzate il senso del tatto, ogni transistor contiene uno strato sottile e molto elastico di gomma, modellato a forma di piramide invertita. Se sottoposto a pressione, questo strato modifica il suo spessore, con conseguente modifica del flusso di corrente nel transistor. I sensori sperimentali di questo tipo prevedono da centinaia di migliaia fino a decine di milioni di queste piramidi per centimetro quadrato, in funzione della sensibilità che si vuole raggiungere. Vi sono però altre linee di ricerca che privilegiano i materiali inorganici, quindi non basati sulla chimica del carbonio, partendo dal fatto che i materiali organi, pur flessibili e più facili da lavorare, non sono buoni conduttori di elettricità. In questo caso il filone di ricerca è rivolto alla realizzazione di nanofili con cui creare superfici altamente flessibili e con buona conduzione di elettricità. Un esempio arriva dall’università di Berkeley dove, per arrivare una e-skin inorganica, i ricercatori hanno creato dei nanofili di germanio/silicio poi depositati su un substrato plastico e organizzati secondo una matrice con l’equivalente di più transistor, ciascuno dei quali è costituito da centinaia di nanofili a semiconduttore. A questi transistor è stato poi integrato uno strato di gomma, come nel precedente caso di materiale organico, per dare la base del tatto. Questa e-skin è in grado di “sentire” una pressione da 1 a 15 kilopascal, livelli equivalenti alla forza necessaria a tenere in mano un uovo o un frutto maturo senza romperlo.


{kind=link}