




{kind=link}
Stampare in 3D delle pinze in plastica per diminuire l’inerzia torsionale ed aumentare la velocità della macchina. Questo è l’obiettivo raggiunto da Pulsar Industry, l’impresa che offre soluzioni di automazione industriale e software di fabbrica per il settore alimentare.
Il progetto, nato dall’esigenza aziendale di raggiungere dei target di produzione maggiormente performanti, è stato sviluppato da ProM Facility. Questo è il centro di prototipazione meccatronica e sviluppo prodotto di Trentino Sviluppo che, come Pulsar Industry, ha sede presso il Polo Meccatronica a Rovereto.
L’intervento sul braccio robotico per un ciclo di trasporto più breve
Il sistema braccio-pinza di Pulsar Industry afferra gli oggetti da un nastro trasportatore e li posiziona con precisione e rapidità in un contenitore. La presa avviene attraverso ventose pneumatiche posizionate sulla pinza, in grado di trattenere i prodotti e garantire così la continuità del percorso di movimentazione.
L’efficienza produttiva dell’intero sistema automatizzato risulta condizionata dai tempi d’azione. Il lavoro di diminuzione delle masse e delle inerzie in gioco ha reso più veloce il robot, riducendo così la durata dell’intero ciclo di trasporto.
Il redesign e la stampa 3D delle pinze
Il progetto sul braccio robotico rappresenta uno dei tanti esempi di collaborazione vincente tra Pulsar Industry e ProM Facility. In questo caso specifico l’azienda di Rovereto ha chiesto al centro di prototipazione meccatronica di stampare delle parti in metallo che avevano bisogno di modifiche veloci.
Una sfida accolta dalla facility di Polo Meccatronica, che ha svolto un lavoro di metal replacement proponendo dei modelli in plastica al posto dell’acciaio, il materiale originale, ottimizzando così i tempi e i costi di realizzazione.
I nuovi pezzi sono stati stampati in 3D in Poliammide 12 (PA12), conosciuta anche come Nylon 12, utilizzando la tecnologia HP Multi Jet Fusion (MJF).
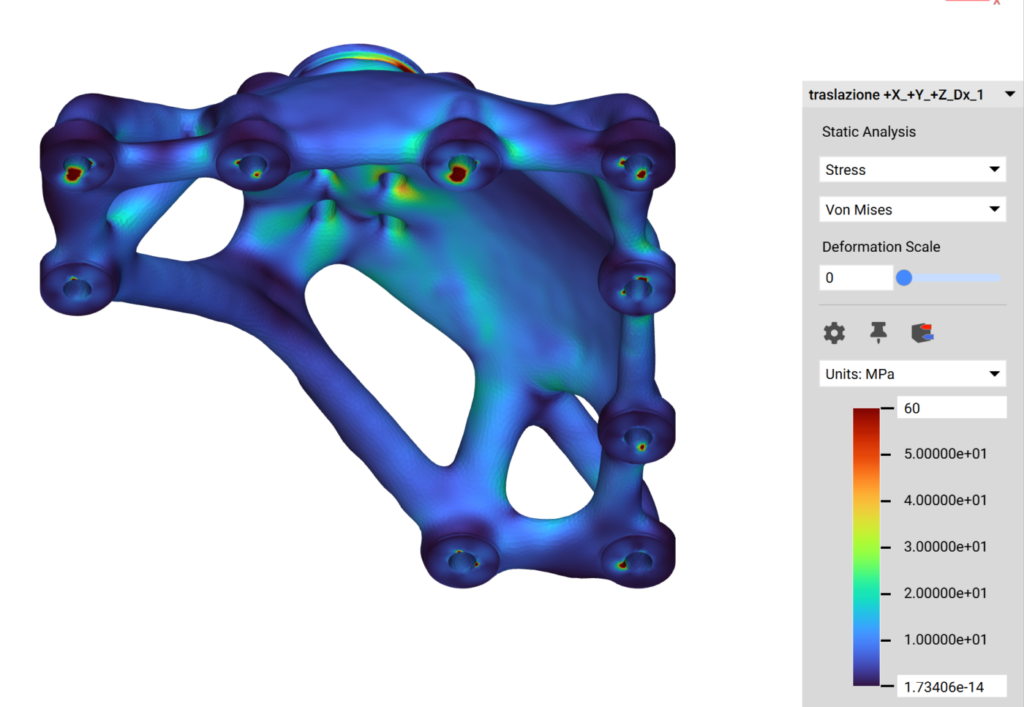
Per diminuire le masse e le inerzie delle pinze, ProM Facility ha seguito un approccio ibrido, combinando la simulazione FEM (Finite Element Method) con l’ottimizzazione topologica.
I risultati ottenuti
In fase di riprogettazione le tubazioni che portano il vuoto alle ventose sono state trasformate nella struttura portante della pinza. In questo modo è stato possibile minimizzare l’uso del materiale, migliorando inoltre il flusso dell’aria nei canali. Prima di questo passaggio i tubi per il vuoto erano esterni alla struttura di alluminio e tutti i raccordi metallici risultavano lontani rispetto all’asse di rotazione.

Il risultato finale ha raggiunto a pieno l’obiettivo iniziale. In seguito al lavoro di redesign, infatti, il peso del modello è passato da 1.520 grammi a 711 grammi e l’inerzia torsionale è di gran lunga diminuita rispetto alla situazione di partenza.