
 Nell’attuale contesto produttivo delle piccole medie imprese, caratterizzato da una sempre più spinta personalizzazione dei propri prodotti e lotti di dimensione sempre più ridotta, i sistemi di programmazione delle macchine o delle celle di lavoro utilizzate per la produzione rivestono un ruolo chiave per consentire di mantenere prezzi competitivi sul mercato.
Nell’attuale contesto produttivo delle piccole medie imprese, caratterizzato da una sempre più spinta personalizzazione dei propri prodotti e lotti di dimensione sempre più ridotta, i sistemi di programmazione delle macchine o delle celle di lavoro utilizzate per la produzione rivestono un ruolo chiave per consentire di mantenere prezzi competitivi sul mercato.
L’utilizzo di sistemi di programmazione avanzati ma nel contempo semplici da usare, porta come beneficio non solo la riduzione dei costi di formazione del personale, ma anche un’effettiva riduzione del costo richiesto per introdurre sul mercato un nuovo prodotto, una sua variante o anche semplicemente per permettere l’ottimizzazione del processo produttivo di un prodotto consolidato. Inoltre, nel momento in cui la programmazione viene effettuata tramite l’utilizzo di un simulatore che consente di ricreare su PC il comportamento del macchinario, si ottiene l’ulteriore beneficio economico di non dover bloccare la produzione per la programmazione di un nuovo codice.
La soluzione
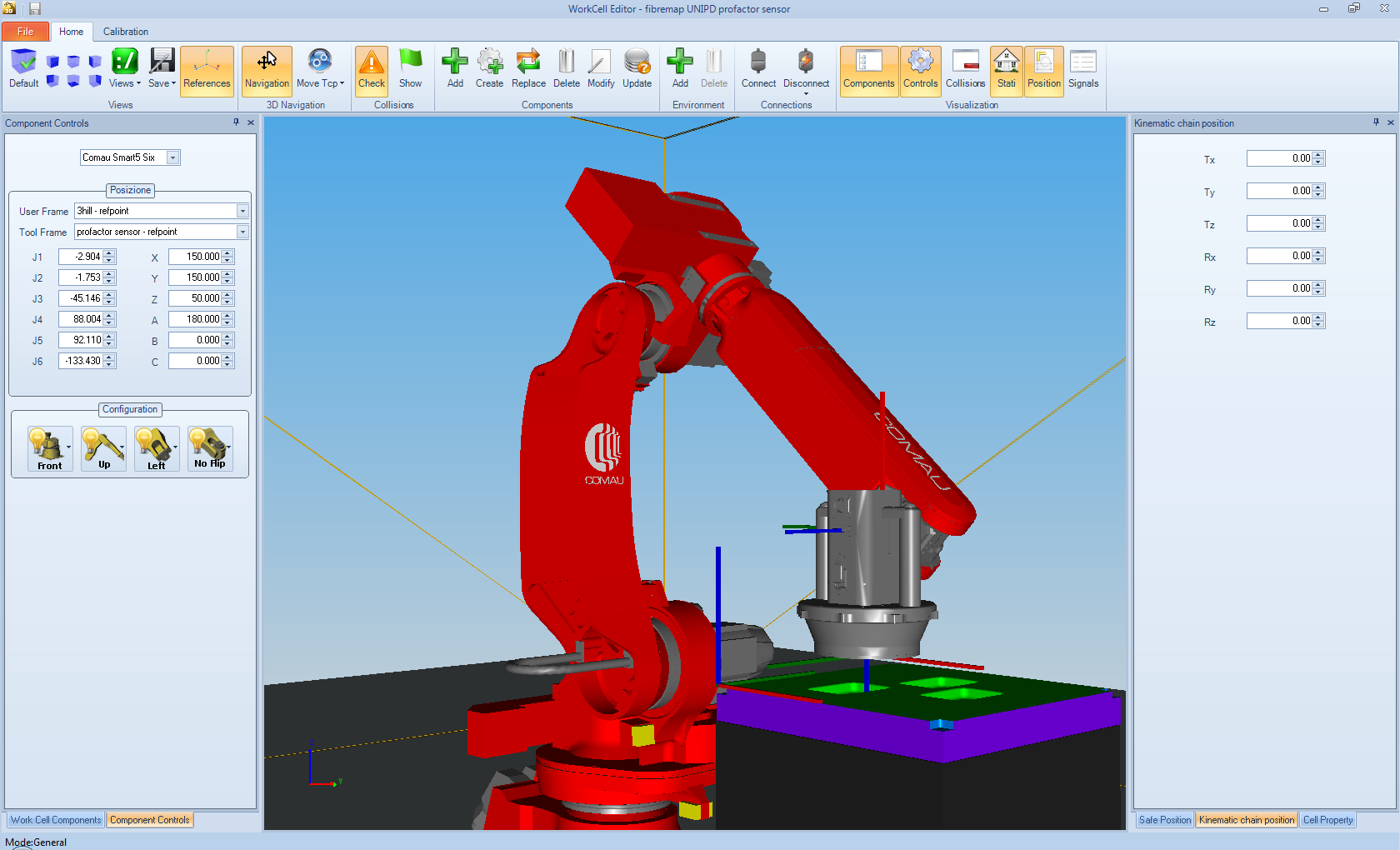
Forte di queste considerazioni, IT+Robotics ha avviato nel 2007 le attività di ricerca in questo campo, che sono culminate nel rilascio della soluzione software Workcell Simulator. Workcell Simulator è la suite completa di applicazioni per la simulazione su ambiente visuale 3D di tutte le fasi di programmazione del macchinario o di una cella con robot manipolatori. Partendo dal disegno del pezzo da lavorare, Workcell Simulator consente la programmazione offline dell’intero processo di lavoro. Mediante l’utilizzo di post-processor, il programma può quindi essere compilato per essere utilizzato dai robot e dai macchinari dei più comuni produttori. L’intera programmazione avviene in ambiente simulato, senza il bisogno di impegnare l’impianto durante la programmazione. Gli obiettivi alla base della progettazione di Workcell Simulator sono due: semplicità di programmazione e flessibilità della soluzione. La semplicità di programmazione è il punto chiave per ridurre il tempo di formazione ed ottimizzare gli sforzi di programmazione da parte dell’utente. Sono stati realizzati diversi interventi volti a rendere più semplice ed efficace la programmazione. In primo luogo, le interfacce utente sono studiate con particolare ergonomia, utilizzando paradigmi famigliari e semplici da utilizzare. Sono state inoltre introdotte svariate procedure guidate per permettere anche all’utente meno esperto di portare a termine le proprie attività senza la necessità di particolare formazione o supporto esterno. Un ulteriore grado di semplificazione si è quindi ottenuto inserendo funzionalità di calcolo automatico che consentano all’utente di concentrarsi su cosa per lui è importante, tralasciando i dettagli agli algoritmi contenuti nel software. Di particolare importanza sono le funzionalità di calcolo automatico delle traiettorie, applicate in particolare ai robot manipolatori. Gli algoritmi inseriti nel simulatore, frutto di anni di ricerca e della collaborazione con l’Università di Padova, consentono di calcolare in modo efficiente la traiettoria per portare il robot nei punti definiti dall’utente, calcolando in modo automatico i punti intermedi al fine di evitare gli ostacoli presenti nella cella di lavoro. Questo garantisce l’assenza di collisioni durante i movimenti, ottimizzando nel contempo il tempo ciclo. Gli stessi algoritmi possono essere utilizzati anche per macchinari multi-asse, ad esempio per calcolare le traiettorie di sblocco tra una fase di lavorazione e la successiva. Il passo finale nel percorso di semplificazione è quello di creare un sistema di programmazione completamente autonomo, che consenta l’introduzione di un nuovo codice a partire dal modello CAD del prodotto con un singolo click. Per ottenere questo risultato, è possibile integrare all’interno del simulatore avanzati algoritmi, detti di task planning, appositamente studiati per racchiudere le logiche di programmazione di un determinato processo.
Flessibilità e velocità
Il secondo obiettivo di Workcell Simulator è quello di fornire una soluzione unificata che si possa adattare ad ogni macchinario e ad ogni processo. Per ottenere questo obiettivo, Workcell Simulator è stato sviluppato con un approccio estremamente modulare: è possibile personalizzare ogni singolo dettaglio del comportamento del software, a partire dalla logica dei componenti utilizzati fino alle caratteristiche della cella di lavoro, dalle informazioni raccolte dall’utente per la programmazione fino alla generazione del codice che verrà caricato nel controller. Grazie all’approccio scelto, è possibile utilizzare Workcell Simulator per la gestione di macchinari o processi anche molto differenti tra di loro, non ponendo alcun limite alle potenzialità della soluzione. A testimonianza di questo, IT+Robotics ha seguito negli anni svariati progetti per lo sviluppo di sistemi di programmazione basati sul proprio prodotto Workcell Simulator. Tra le prime verticalizzazioni è stata considerata la programmazione offline di celle robotiche nel settore della lamiera, in particolare per la presso-piegatura. Workcell Simulator è stato utilizzato per creare un software che consentisse, partendo dal modello 3D del prodotto piegato, di definire tutti i dettagli del processo di piegatura tramite robot manipolatore, comprese le fasi di caricamento e pallettizzazione. Un ulteriore esempio è dato dalla verticalizzazione in grado di permettere la programmazione offline di un macchinario curva tubi. Un importante settore di applicazione è quello della programmazione di sistemi per il controllo qualità visivo basati su robot manipolatori. In questo settore, la ricerca condotta da IT+Robotics anche grazie a tre progetti finanziati dalla comunità europea (3D Complete, Thermobot e Fibremap), ha consentito lo sviluppo di Smart Check 3D, la soluzione di IT+Robotics per il controllo qualità flessibile basato sull’utilizzo di dispositivi di visione montati su robot manipolatore. Workcell Simulator è stato utilizzato anche in questo caso come base per il software di programmazione dell’impianto. Di particolare rilievo è stata l’introduzione di algoritmi per il calcolo automatico delle traiettorie del ciclo di controllo in modo da permettere una copertura al 100% dell’area di interesse del prodotto, ottenendo una soluzione che richiede un solo click per la programmazione di un nuovo codice. Tale soluzione può inoltre essere utilizzata anche per altre tipologie di processi automatizzati tramite robot manipolatori, come ad esempio la verniciatura o la pallinatura. Grazie all’estrema flessibilità e versatilità di utilizzo, Workcell Simulator si rivela essere la soluzione perfetta per i costruttori di macchine e system integrator interessati a migliorare le caratteristiche del proprio ambiente di programmazione.
STAI LEGGENDO
- Rassegna prodotti e applicazioni.
LEGGI ANCHE
- Intervista ad Arturo Baroncelli, Presidente IFR (International Federation of Robotics);
- Intervista a Rezia Molfino, Professoressa dell’Università di Genova, Presidente SIRI, e Presidente IIS;
- Mercato della robotica;
- Futuro della robotica a cura del Comitato Tecnico Scientifico della rivista Automazione Integrata;
- Rassegna prodotti e applicazioni.


{kind=link}